カタログの抜粋

Remote Control System for Propulsion Kongsberg Maritime reserves the right to make changes to the material or product described, at any time without notice.
カタログの1ページ目を開く
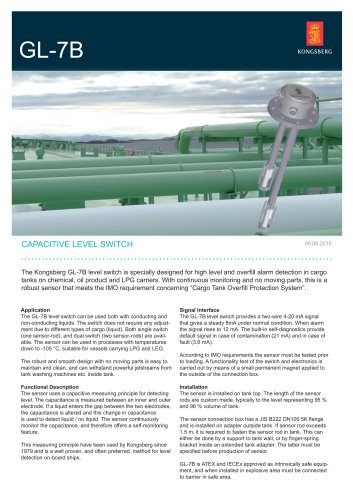
System overview The KONGSBERG K-Thrust TC concept combines autono- mous control systems for each propulsion and thruster unit into one system for mode selection and command responsi- bility transfer. A Thruster Controller is the main unit of each control system. This cabinet is often located near the propulsion unit or its motor controller. From the Thruster Controller, a communication bus links operator panels on the bridge and in the ECR (where applicable) to the controller. The bus based communication between intelligent components sim- plifies installation and reduces overall cost....
カタログの2ページ目を開く
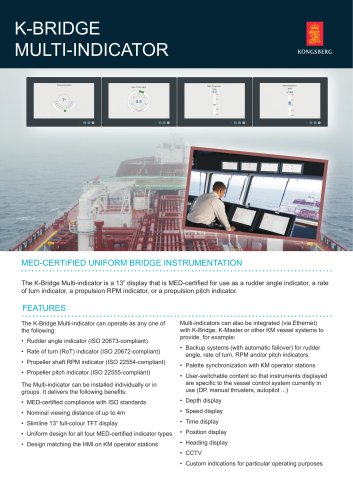
K-Thrust TC general features Command responsibility transfer between bridge positions and between bridge and engine room is handled by synchro- nisation of the individual thruster controllers. Command transfer within the bridge is common to all units, while transfer to/from the ECR can be individual to each unit. Bumpless transfer between locations is either by manual alignment of the thruster levers following the guidance given on the panel, or automatically by the "electric shaft" Command responsibility transfer between control systems is handled from mode selection panels that...
カタログの3ページ目を開く
The Thruster Controller unit contains the control system processor(s). It interfaces the operator panel communication bus and serves as field interface to the servo actuators, servo controllers (applies to pitch and azimuth control), feedback units Thruster Controllers receive commands from other control systems (e.g. DP controller) via a local area network or by direct wiring. Commands from the operator are read via the panel bus. Both the local area network and the panel bus are installed in a star topology ensuring that a single malfunction in communication does not affect more than a...
カタログの4ページ目を開くKongsberg Maritime/コングスバーグのすべてのカタログとパンフレット
-
 GL-10
GL-102 ページ
-
 GL-3D
GL-3D4 ページ
-
 K-Bridge AP
K-Bridge AP2 ページ
-
 K-THRUST
K-THRUST2 ページ
-
 GL-7B
GL-7B2 ページ
-
 μPAP
μPAP3 ページ
-
 cNODE® Modem MiniS
cNODE® Modem MiniS2 ページ
-
 Sounder
Sounder1 ページ
-
 AutoChief 600
AutoChief 6002 ページ
-
 DP Logger
DP Logger2 ページ
-
 K-Thrust RCS
K-Thrust RCS2 ページ
-
 cC-1
cC-12 ページ
-
 cJoy WT
cJoy WT2 ページ
-
 cJoy OT
cJoy OT2 ページ
-
 cJoy Controller
cJoy Controller2 ページ
-
 cJoy PE
cJoy PE2 ページ








カタログアーカイブ
-
 EM 2040C MKII
EM 2040C MKII2 ページ
-
 DRS 500/IMS 500
DRS 500/IMS 5002 ページ
-
 The Seapath family
The Seapath family12 ページ
-
 mini MRU
mini MRU2 ページ
-
 Company brochure
Company brochure19 ページ
-
 company borchure 2019
company borchure 201913 ページ
-
 MGC R2
MGC R22 ページ
-
 DP alert system
DP alert system2 ページ
-
 Automatic DP alert
Automatic DP alert2 ページ
-
 EELUME500
EELUME5002 ページ
-
 REMUS 6000
REMUS 60002 ページ
-
 REMUS 600
REMUS 6002 ページ
-
 Naval AUV product range
Naval AUV product range16 ページ
-
 Munin AUV
Munin AUV2 ページ
-
 SEAGLIDER
SEAGLIDER2 ページ
-
 SEAGLIDER C2
SEAGLIDER C22 ページ
-
 SEAGLIDER M6
SEAGLIDER M62 ページ
-
 HISAS 1030
HISAS 103012 ページ
-
 KM-workboats-folder
KM-workboats-folder4 ページ
-
 KM OSV brochure
KM OSV brochure8 ページ
-
 HiPAP Family brochure
HiPAP Family brochure24 ページ
-
 REMUS catalog
REMUS catalog8 ページ
-
 OE14-408
OE14-4082 ページ
-
 OE14-110/111
OE14-110/1112 ページ
-
 oe15-108/109
oe15-108/1092 ページ
-
 OE15-110/111
OE15-110/1112 ページ
-
 Hugin family of AUV's
Hugin family of AUV's28 ページ
-
 Motion Gyro Compass
Motion Gyro Compass2 ページ
-
 Kongsberg GlobalSim
Kongsberg GlobalSim5 ページ
-
 K-CHIEF 700
K-CHIEF 7009 ページ
-
 K-CHIEF 600
K-CHIEF 6004 ページ
-
 OE14-372/373
OE14-372/3731 ページ
-
 OE14-364/365
OE14-364/3651 ページ
-
 OE14-308
OE14-3081 ページ
-
 OE14-208
OE14-2081 ページ
-
 oe15-358/359
oe15-358/3591 ページ
-
 OE15-100c/101c
OE15-100c/101c1 ページ
-
 OE13-124/125
OE13-124/1252 ページ
-
 OE14-522
OE14-5221 ページ
-
 oe14-502
oe14-5021 ページ
-
 AIS 200
AIS 2002 ページ
-
 HPR 418
HPR 4182 ページ
-
 HPR 408S
HPR 408S2 ページ
-
 RADius
RADius2 ページ
-
 DPC-3
DPC-32 ページ
-
 DPC-1
DPC-12 ページ
-
 OS-650-DP
OS-650-DP2 ページ
-
 DARPS 116
DARPS 1162 ページ
-
 REMUS 100
REMUS 1006 ページ
-
 AIS 200 BF
AIS 200 BF2 ページ
-
 GeoSwath Plus
GeoSwath Plus16 ページ
-
 Engine Room Simulator
Engine Room Simulator16 ページ
-
 Pressure sensors
Pressure sensors5 ページ
-
 Signal converters
Signal converters5 ページ
-
 Products for tankers
Products for tankers32 ページ
-
 LNG vessel automation
LNG vessel automation12 ページ
-
 Cruise
Cruise20 ページ
-
 Yacht brochure
Yacht brochure12 ページ
-
 K-MASTER WORKSTATION
K-MASTER WORKSTATION12 ページ
-
 cJoy system
cJoy system2 ページ
-
 AIS 200 P
AIS 200 P2 ページ